



Testa GNSS-mottagare i realtid
Tidigare har man tvingats göra omfattande och kostsamma fälttester för att verifiera att en enhet fungerar korrekt under svåra förhållanden.
Dessa testsekvenser ersätts i allt högre grad av record- and playbacksystem. Med speciella GNSS simulatorer kan man säkerställa funktionen under olika testförhållanden. Här ser vi R&S SMBV100A använd som GNSS-simulator.
Positionsbaserade tjänster i smartphones och navigeringsenheter kan göra livet enklare för oss. För att bärbara enheter skall kunna erbjuda och använda dessa tjänster installeras mottagarmoduler för satellitbaserade navigationssystem. Ju snabbare och noggrannare en mottagarmodul kan fastställa sin aktuella position, dess då bättre blir upplevelsen för användaren.
Ideala mottagningsförhållanden för dessa system är när de har fri sikt (LOS – Line Of Sight) till satelliter som sänder i det globala satellitnavigeringssystemet (GNSS – Global Navigation Satellite System). Det är emellertid ovanligt att de mobila enheterna används enbart i områden där det råder fri sikt. Användarna förväntar sig att utrustningen alltid skall fungera oavsett var de befinner sig, alltså även i stadsbebyggelse eller till och med i de urbana dalgångarna i stora städer.
Städer ger särskilt svåra förhållanden för satellitbaserade navigationssystem på grund av skuggning och flervägsutbredning. Hur skall man då säkerställa att en mottagare klarar dessa lägen? Tidigare har man varit tvungen att göra omfattande och kostsamma fälttester för att verifiera att en enhet fungerar korrekt under svåra förhållanden.
Dessa testsekvenser ersätts i allt högre grad av Record- and Playbacksystem. Dessa testsystem reducerar mängden nödvändiga testkörningar. Speciella GNSS- simulatorer som har försetts med nödvändig funktionalitet används för att säkerställa om den implementation man gjort i sin utrustning fungerar effektivt under olika testförhållanden.
Vad GNSS-simulatorer skall kunna
Idealt skall det vara möjligt att använda en GNSS-simulator till alla de tester som behöver utföras under utvecklingsprocessen. Moderna navigationssystem stödjer både GPS- och Glonass-standard. Därför skall en lösning med en GNSS-simulator tillåta upp till 24 satelliter för hybridkonstellationer. Detta motsvarar det maximala antalet satelliter från båda systemen som samtidigt kan vara synliga ovanför horisonten. På så sätt kan simulatorn tillhandahålla det maximala antalet satelliter som kan bidra till den mottagna signalen oavsett var i världen man befinner sig.
För många standardtester, till exempel ”Time To First Fix” (TTFF), positioneringsnoggrannhet eller stabilitet mot störningar, måste simulatorn generera en signal som är likvärdig med vad mottagaren skulle ta in i en specifik position. En realtidssimulator är till stor hjälp så att man slipper ändra konfigurationen manuellt hela tiden. Realtidssimulatorn måste automatiskt justera signalerna så att de representerar satelliternas konstellation i omloppsbanorna för en given tidpunkt. En sådan simulering representerar ideala signaler utan skuggning och andra effekter. Utvidgar man funktionaliteten så blir det möjligt att simulera en mottagare i rörelse, till exempel motsvarande en GPS-mottagare som sitter i en bil som är i rörelse. Sist men inte minst skall testscenariot också ta hänsyn till utbredningseffekter i troposfären och jonosfären för att ge en fullständig simulering av en verklig situation. De viktigaste modellerna för detta är STANAG-modellen för troposfäriska effekter och Klobuchar modellen för jonosfäriska effekter.
Verkliga scenarion med ”line of sight” och skuggning
I stadsmiljö tar GNSS-mottagaren sällan emot sin signal direkt. Signalerna förvanskas normalt på grund av exempelvis skuggning och flervägsutbredning. För att göra en trovärdig simulering av egenskaperna hos en GNSS-mottagare i stadsmiljö krävs att dessa effekter simuleras så realistiskt som möjligt.
Skuggning kan åstadkommas av till exempel byggnader, träd, fordon och andra objekt. Simulering av fullständig skuggning utan reflektioner åstadkommer man med ett elevations- och azimut filter för alla satelliter som ingår i den totala GNSS-signalen. Filtrets egenskaper bestäms av de geometriska förhållandena i den simulerade omgivningen. Simuleringen måste ta hänsyn till infallsvinkel och position i förhållande till mottagaren separat för varje enskild satellit och sedan justera dem med avseende på objekten som skuggar runt mottagaren.
Eftersom satelliterna rör sig längs sina omloppsbanor måste simuleringen uppdateras kontinuerligt. Högre uppdateringsfrekvens (inklusive beräkningarna av skuggning) ger mer realistiska signaler in till mottagaren. En uppdateringsfrekvens av 1 Hz är normallt tillräcklig för att simulera denna effekt eftersom ändringen av infallsvinkeln för satelliten är betydligt mindre än 1 grad per minut.
Skuggningsfiltret för en stillastående mottagare kan entydigt beräknas om man tar hänsyn till alla effekter runt den simulerade positionen. Simulatorn genererar objekten i en cirkel runt mottagaren och överlagrar detta filter med infallsvinklarna för satelliterna.
Situationen blir mer komplex när man skall simulera en mottagare som befinner sig i rörelse. Objekten och de filter som genereras baserat på dessa förändras kontinuerligt. Idealt så gör man på samma sätt som i det statiska fallet, men på grund av rörelsen måste filtret justeras kontinuerligt. För att förenkla processen väljer man ofta att bara ta med objekten på höger och vänster sida om den rörliga mottagaren i dess rörelseriktning, när man simulerar skuggningen för en mottagare i rörelse.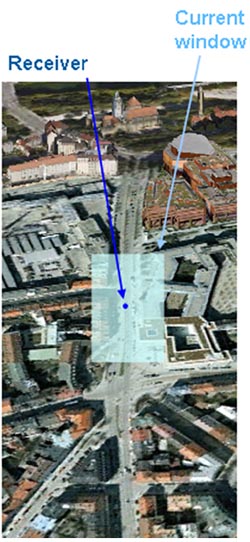
Fig 1: Gata i bebyggt område med överlagrat filter
Uppdateringsfrekvensen i GNSS-simulatorn är en viktig faktor för att få en realistisk simulering av dessa effekter. Medan det är tillräckligt med en uppdateringsfrekvens av 1 Hz för en statisk mottagare, så måste man för en mottagare i rörelse också ta hänsyn till den hastighet med vilken mottagaren förflyttar sig.
För att simulera alla effekter korrekt, måste uppdateringsfrekvensen vara högre än förhållandet mellan hastighet och objektets längd. Ett exempel: om man antar att högsta hastigheten är 100 meter per sekund, så kan man med en uppdateringsfrekvens av 100 Hz simulera inverkan av ett objekt som är minst 1 meter långt.
Skuggning är bara en av de effekter som fås av byggnader. En annan effekt man måste ta hänsyn till är flervägsutbredning av signalerna från enskilda satelliter som orsakas av reflektion i olika objekt, till exempel glas och betong på husfasaderna. Villkoren före de individuella signalerna varierar kraftigt eftersom alla signalvägar har olika sträckningar. Det finns fyra olika scenarion.
* Fullständig skuggning
* Enbart direkt signal (det ideala fallet)
* Flervägsutbredning som innehåller direkt signal
* Flervägsutbredning utan direkt signal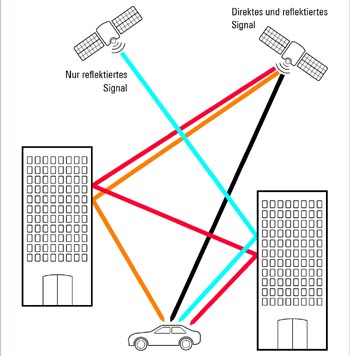
Fig. 2: Flervägsutbredning vid byggnader
Många utbredningsvägar – ett mål
Flervägsutbredning kan variera kraftigt på grund av den simulerade omgivningen. Det reflekterade materialets egenskaper påverkar fasförskjutning och dämpning i samband med reflektionen. Det betyder att simuleringen måste ta hänsyn till olika egenskaper hos glas respektive betongfasader. Studier har visat att antalet utbredningsvägar man behöver ta hänsyn till ges av tre kriterier:
* Den relativa signalstyrkan vid mottagaren relativt den direkta signalen (LOS – Line Of Sight), eller relativt en signal som endast är lätt dämpad. I detta scenario måste man ta hänsyn till signalen eftersom den kan ge upphov till kraftig distorsion.
* Om flera signaler, inklusive LOS signalen, når mottagaren med olika signalstyrka, kommer de signaler som reflekterats flera gånger att vara kraftigt dämpade (typiskt mer än 15 dB). Dessa kommer endast att ge upphov till ringa distorsion och behöver därför inte tas med i simuleringen.
* För signaler som reflekterats upprepade gånger, så blir fördröjningen relativt LOS-signalen så stor att de efter korskorrelering och trackning i mottagaren kommer att förkastas. De kan således också ignoreras i simuleringen.
Utmaningen för mottagaren är skilja mellan direkt signal och tidsfördröjda reflektioner. Markreflektion kan försummas i detta sammanhang, om man antar en höjd av 1,5 meter och en sträcka av 3 meter, eftersom offseten faller utanför noggrannheten för en kommersiell GNSS-mottagare. Om man ansätter alla tre kriterierna, så är det bara några få av alla de möjliga flervägssignalerna som når mottagaren, som också ”ses” av denna. Det är bara detta fåtal som man behöver ta hänsyn till i simuleringen.
Under test måste effekten av flervägsutbredningen simuleras både för statiska mottagare och mottagare som är i rörelse. Flervägsutbredningen kan simuleras automatiskt i GNSS-simulatorn genom att man definierar de objekt som skuggar och egenskaperna för objektens ytor. Alla nödvändiga data (satellitbanor från almanacka samt efemerider, position, tid och objektens geometri) lagras i simulatorn.
Nu är det inte bara signalkällans position som påverkar signalkvalitén utan också mottagarens läge. Antenner är ett bra exempel. Beroende på var antennen för en GNSS-mottagare befinner sig, så kan man få ytterligare effekter. Till exempel om mottagaren är i en smartphone eller i en mobil navigeringsenhet i en bil så måste man ta hänsyn till den skuggning som fås av metallen i bilens kaross. Eftersom detta påverkar som ett ytterligare filter med skuggning eller fasförskjutning av signalerna, benämner man detta antenndiagram. Också denna effekt måste man ta hänsyn till i simuleringen.
Speciella scenarion: flyg & försvar
En helt annan situation uppstår i när man använder GNSS-mottagare i militära applikationer. I flygsammanhang minskas inte antalet satelliter av skuggning, inte heller behöver man ta hänsyn till reflektioner från byggnader eller andra objekt i simuleringen. Däremot måste man, eftersom mottagarna används på varierande höjd, ta med markreflektionen i studien så länge tidsfördröjningen för GPS inte är större än 2 chip. Här måste man ta hänsyn till ett antal olika modeller för specifika markförhållanden. Man skiljer mellan vatten, torr mark och fuktig mark.
Monteringen av antennen spelar också roll när det gäller mottagning och simulering av GNSS-mottagare i militära applikationer. Om antennen placeras så att den bara ser i en riktning (till exempel på ovansidan av ett flygplan) så elimineras i stort sett markreflektionen. Beroende på flyplanets läge när det svänger kan det uppstå skuggning, eftersom flygplanskroppen skymmer delar av skyn. För att simulera dessa effekter, måste man definiera planets rollande och dess flygsträcka så att GNSS-simulatorn kan ta hänsyn till detta och lägga in det i filtret för antenndiagrammet.
Detta scenario kan också utvidgas till att innefatta missiler genom att man i simuleringen inkluderar påverkan av att missilen hela tiden roterar. Normalt har GNSS-enheten på en missil antenner som är jämnt fördelade runt den, så att flera satelliter är synliga hela tiden. På så sätt säkerställer man att positionen hela tiden kan beräknas korrekt. Missilens rotation kan definieras genom en AM skanning. För en realistisk simulering, måste man individuellt för varje satellitsignal ta hänsyn till variationerna i signalstyrka när den tas emot. Detta på grund av att satellitens infallsvinkel i varje antenn varierar när missilen roterar.
Kompex simulering
En GNSS-simulator måste kunna mycket mer än att bara simulera signaler från ett antal satelliter. När man testar om en GNSS-simulator kommer att fungera korrekt i reella scenarion så måste ett stort antal faktorer, framför allt beroende på utbredningseffekter, simuleras både för stillastående och rörliga mottagare. Detta är möjligt genom exakta simuleringsmodeller och omfattande databaser.
Alain Mignot, Livingston och Darren Tipton, Rohde & Schwarz
Faktaruta:
Egenskaper hos GNSS-simulatorn i R&S SMBV100A
* MultiMode GNSS-simulator, med stöd för GPS, Glonass och Galileo, inklusive Hybrid Mode
* Support för militär P-kod i GPS-signaler för upp till 12 satelliter
* Simulering av upp till 24 satelliter samtidigt
* Upp till 24 kanaler, som kan användas för satelliter eller flervägsutbredning
* Simulering av troposfäriska och jonosfäriska effekter
* Simulering av skuggning för statiska och rörliga mottagare
* Automatisk beräkning av flervägsutbredning genom direkt reflektion baserat på definitioner av de reflekterande objekten
* Simulering av antenndiagram
* Simulering av rotation hos missiler
* Uppdateringsfrekvens av signalen från GNSS-simulatorn: 100 Hz. För simulering av rotation används betydligt högre frekvens: >2 kHz
* Komplett vektor signalgenerator med stöd för alla viktigare digitala standarder, inklusive LTE, Bluetooth® och WLAN och dessutom rundradio standard som HD Radio™
Filed under: Matteknik




