



Studenter från Beijing världsmästare i Freescale cup
Tekniska universitetet i Beijing kammade hem förstaplatsen när studenter från nio nationaliteter slogs om världsmästartiteln i självgående fordon. Freescale Cup Worldwide Challenge 2015 genomfördes hos Fraunhofer IIS i Erlangen med stöd av ARM, Elektrobit Automotive och Mathworks.
Freescale Cup är en tävling i autonoma elbilar. Uppgiften är att utveckla små elbilar som på kortast möjliga tid tar sig runt en bana, vars sträckning inte avslöjas förrän i tävlingsögonblicket. Dessförinnan har de tävlande lagen kunnat testköra sina fordon på banor med andra utformningar.
Fordonen skall med hjälp av kamerateknik kunna följa banan med hjälp av de svarta linjer den omges av. Banan innehåller såväl kurvor, gupp som Chikaner.
Freescale Semiconductor initierade den här tävlingen för 13 år sedan i Asien. Den har genomförts tre gånger i Europa och närmare bestämt hos Fraunhofer Institute of Integrated Circuits, IIS, de senaste två åren.
Tävlingens ”pro motor” och konferencier är Flavio Stiffan, ansvarig för Freescales universitetsprogram i EMEA.
Universitet i hela världen är inbjudna att delta i tävlingen. Flavio Stiffan uppskattar att det finns 5000 studentgrupper i världen som arbetar med projekt runt autonoma fordon. Totalt kom årets tävling att beröra 32 000 studenter.
Den 15 september korades världsmästarlaget från Kina vars fordon tog sig runt den komplexa banan på 17,127 sekunder medan den längsta uppmätta tiden uppgick till 42,431.
I placeringarna efter Kinas lag kom Malaysia, Schweiz, Korea, Taiwan, Brasilien, Mexiko, USA och Indien.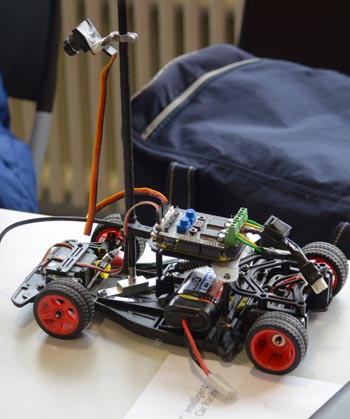
En av de tävlande fordonen. Kameran läser av körbanans markerade ytterkanter.
Varje lag, bestående av minst två men högst tre studenter, hade sex månader på sig att bygga ihop, programmera och testa sina fordon.
Före finalen skulle de inom sex och en halv timma provköra och trimma in sina fordon på banor med annan sträckning än hos tävlingsbanan.



Det skulle med andra ord inte vara möjligt att optimera fordonen för just den banan. Fordonen måste med kunna accelerera, bromsa och styra i rätt tid och grad för att hålla sig på banan.
Mekaniskt sett är tävlingsdeltagarnas fordon lika, drivna av två 7,2 V likströmsmotorer. Hjuldiametrar och däcksbredd får inte ändras, inte heller hjulbasen. Chassit utgör en modell i skala 1/18.
Studenterna utvecklar egen programvara som körs på hårdvara från Freescale, och som ingår i grundsatsen. Med given hårdvara kan studenterna utveckla egen motorstyrning och programvara för att styra sitt intelligenta fordon.
Till regelverket hör att fordonen tillåts ha upp till sex sensorer. Navigeringen måste ske utifrån informationen från en optisk sensor. Naturligtvis får inte fordonet kunna styras utifrån under tävlingen.

Tävlingsbanan ser vi här, utformad efter godkännande av tävlingsbilarna. Efter godkännande förbjöds vidare intrimning.
Om fordonen råkar köra utanför banan är upp till ytterligare två försök möjliga. Men efter den först genomförda turen runt får man inga fler möjligheter till att förbättra resultatet.
Så var det dags för start:
Under tävlingen i Erlangen körde flera fordon av banan och fick göra nya försök. Men till sist klarade sig alla de deltagande lagen.
Filed under: Utländsk Teknik




