



Lanserar IP för snabbare bilradar
Ensilica lanserar nu en Kalman Filter acceleration IP-kärna för användning i radarsensorer till avancerade förarassistanssystem (ADAS), med funktioner såsom kollisionsvarnare, döda vinkel-varnare, filbytesdetektering och självparkering.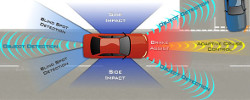
Ensilicas ”Kalman Filter acceleration” IP-kärna har enligt företaget utvecklats enligt de riktlinjer som krävs för integration med enheter som uppfyller funktionssäkerhetskraven i standarden ISO 26262 för vägfordon. IP-kärnan har enligt företaget stöd för både klassisk Kalmanfiltrering (KF) och utökad Kalmanfiltrering (EKF). Den hanterar både Range (avstånd) och Doppler (hastighet) lokväl som Azimuth (position)-mätningar samt tillämpar Kalmanfiltrering för att förutsäga målets position i nästa tidsintervall. Den kombinerar radarmätningarna med en dynamisk rörelsemodell för att förbättra mål-, positions- och hastighetsuppskattningar med framåtprediktering så att ”falska larmmätningar” kan kasseras.
För ett typiskt fordonsradarsystem menar företaget att deras lösning kan göra en beräkning för en statusuppdatering på omkring 10 μs. Detta möjliggör i sin tur att ett stort antal ”målspår” kan underhållas vid en given tidpunkt, eftersom den här nivån på bearbetningslatens är mycket kort jämfört med en vanlig radarmätningscykel, som enligt företaget är i storleksordningen några få millisekunder.
– Kalman Filter-spårning är viktig för radarbaserade avancerade förarassistanssystem samt för drönare (UAV:er och UGV:er) som kräver snabb och lyhörd situationsmedvetenhet med hjälp av flera sensorer. Integreringen av Ensilicas Kalman Filter acceleration IP-kärna i front-end DSP-enheten för beräkningskrävande bearbetningsuppgifter vid Kalmanfiltrering ger en kostnadseffektiv ASIC eller FPGA-lösning för att förbättra systemets prestanda och frigör värdefulla processorresurser, säger Ian Lankshear, vd för EnSilica i ett pressmeddelande.
Filed under: Utländsk Teknik




