



Satellitnavigering allt noggrannare
Nya GNSS-signaler, gärna i en kombination av olika system och med efterföljande databehandling, skapar möjligheter till robustare positionering, navigering och tidsbestämning. Det framgick vid radionavigeringsnämndens seminarium hos ÅF, den 29 november. Till trenderna hör navigering av autonoma farkoster samt tillgång till rådata i smarta telefoner.
Jan Johansson, ordförande i Radionavigeringsnämnden, visade bland annat att mycket är att vinna genom att kombinera signaler från olika satellitnavigationssystem (Global Navigation Satellite System, GNSS). Han är även adjungerad professor vid institutionen för rymd-, geo- och miljövetenskap, Onsala rymdobservatorium, inom rymdgeodesi och geodynamik.

Jan Johansson
Idag är fyra GNSS-system i drift: GPS (USA), Glonass (Ryssland), Galileo (Europa) och Compass/Beidou (Kina). Dessutom finns de regionala navigationssystemen QZSS (Japan) och IRNSS (Indien). Förutom dem finns system för att regionalt förbättra data (Regional Satellite Based Augmentation, SBAS): WAAS (USA), EGNOS (EU), MSAS (Japan) och GAGAN (Indien).
Med det europeiska systemet Galileo har noggrannheten kunnat förbättras. Galileo kan komma att sända ut upp till 10 signaler på olika frekvenser.
Den förbättrade precisionen kan utnyttjas för positionering och navigering i realtid vid kartläggning, styrning av maskiner, jordbruk, rymdprojekt och fjärravkänning. Tids- och frekvensdata är synnerligen viktiga för kommunikationsnät och el-nät. GNSS-systemen kan även utnyttjas för att mäta egenskaper hos troposfären och jonosfären. Stora byggnader, som broar, kan övervakas liksom förskjutningar av jordens tektoniska plattor och havsnivåer.
Eliminera felkällor
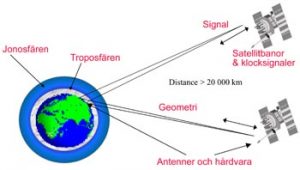
En av flera tänkbara felkällor är mängden fria elektroner i jonosfären. Vertikala fel kan i stort sett elimineras genom att man tar emot två frekvenser (t ex L1 på 1575 MHz och L2 på 1227 MHz från GPS). Dock kvarstår fel på grund av signalernas passage i troposfären. Till det tillkommer lokala effekter som även ökar vid användning av två frekvenser. I framtiden kommer man att kombinera tre frekvenser för att minska fel såväl p g a jonosfären som lokala effekter.
Att kombinera olika GNSS (som GPS, Glonass och Galileo) ger prestandaförbättringar i alla applikationer. Jan visade exempel på förbättringar i den GNSS-applikation som populärt brukar kallas GNSS-R, där R står för Reflektioner. GNSS-R är en teknik där man använder GNSS-signalens reflektioner i föremål, snö, is eller vatten för att mäta och dra slutsatser t ex om havsnivåer.
Sedan länge har man kunnat kombinera data från GPS och Glonass, med en måttlig förbättring som resultat. Idag ger Glonass och Galileo bästa utfallet, likvärdigt med vad GPS + Glonass + Galileo ger. Det visar försök som har genomförts vid Onsala med en antennposition nära havsytan. I försöken använde man en kombination av en uppåtriktad och en nedåtriktad antenn. Den nedåtriktade antennen nåddes av signaler som reflekterats mot vattenytan. Med mätning av tidsskillnaden mellan en direkt signal och den mot havsytan reflekterade signalen kan man uppskatta havsytans nivå.
Satelliterna i de olika systemen följer liknande banor. Ingen av dem går över höga breddgrader. Därför finns områden kring jordens nord- och sydpol där inga navigationssatelliter passerar. På höga latituder fungerar Glonass och Galileo bättre än vad GPS gör.
Förbättrade satellitdata
Magnus Danielsson, Net Insight, visade hur man med olika metoder kan förbättra noggrannheten, från i storleksordningen meter till centimeter.

Magnus Danielsson
Skilda faktorer skapar avvikelser: satellitbanan, satellitens klocka, fördröjning i jonosfären vilken påverkas av mängden fria elektroner, fördröjning i troposfären vilken är frekvensberoende, tidvatten och andra effekter.
Olika metoder för att öka noggrannheten är:
* Rundradiostöd, vilket ger en upplösning i storleksordningen 10 m.
* Med SBAS (Satellite Based Augmentation) kan man förbättra noggrannheten till 2 m.
* Differentiell GNSS, DGNSS,(Differentiell GPS, DGPS) kan ge 1 m i noggrannhet. I detta fall utnyttjar man fasta stationer som grund för korrigeringar.
* Real-Time Kinematik, RTK, relativ bärvågsmätning i realtid, kan ge 2 cm i noggrannhet. I detta fall utnyttjar man en fast referensstation, på känd position, och en rörlig mottagare (rover) på den position man vill bestämma. Båda observerar samma uppsättning GNSS-satelliter. Från de båda dataströmmarna kan man åstadkomma korrigeringar i realtid.
SWEPOS ökar noggrannheten
Lantmäteriets stödsystem för satellitpositionering i Sverige heter SWEPOS. Drygt 400 referensstationer verkar för ökad noggrannhet i positionering genom SWEPOS DGNSS-tjänst, som inleddes 2004.
SWEPOS är skapat i samarbete mellan Lantmäteriet, Onsala rymdobservatorium och RISE.
Stefan Öberg, Lantmäteriet, berättade på seminariet om erfarenheter från mätningar av Galileo-signaler i kombination med SWEPOS. Testverksamheten inleddes 2016 och sedan den 1 februari 2018 är signaler från Galileo inkluderade.
Testresultaten indikerade förbättringar om Galileo lades till satellitsystemen GPS och Glonass, jämfört med om inga Galileosatelliter användes.
Galileo leds från Tjeckien
European GNSS Agency, GSA, ansvarar för marknadsutveckling och för driften av Galileo och EGNOS. Organisationen leds av 160 personer från 22 länder. Martin Sunkevic, från European GNSS Agency berättade på seminariet om hur Galileo hade utvecklats, från planeringens start 2005 till dess att Galileos tjänster kunde tas i bruk mot slutet av 2016. Hittills har 26 satelliter sänts upp och fler förbereds.

Martin Sunkevic
Rådata i mobilen
I augusti 2016 släppte Google rådata från GNSS-mätningar med Android 7. Rådata kan exempelvis användas för att testa hårdvara och programvarulösningar och för med algoritmer för efterföljande databehandling. Med avancerad positioneringsteknik som RTK och PPP kan man skapa lösningar som hittills bara förekommit i professionella lösningar. Rådata erbjuder också nya möjligheter till att upptäcka radiointerferenser och för att upptäcka störkällorna genom att kombinera mätningarna från flera apparater. SBAS tillfogas utan att man behöver lägga till utrustning. Vid tester, prestandaövervakning och utbildningssammanhang kan rådata användas för att övervaka prestanda.
Tillverkarna av mobiltelefoner har börjat utnyttja de möjligheter som rådata ger. Till exempel har Xiaomi släppt världens första smartphone, Mi8, som använder dubbla frekvenser (L1/E1 och L5/E5) för att uppnå en positions noggrannhet av mindre än 1 m. Huaweis första GNSS smartphone Mate 20 är bestyckad med kretsen BCM47755 från Broadcom.
Ett white paper från GSA kan laddas ned från GSAs hemsida. Det beskriver hur man kan dra nytta av rådata från Galileo. Se https://www.gsa.europa.eu/system/files/reports/gnss_raw_measurement_web_0.pdf.
Förarlösa bussar
Skellefteå kommun har genomfört en studie av själgående bussar som skall navigera med hjälp av odometri, IMU, LIDAR, GPS och kameror. Men till skillnad från ett annat andra experiment i stadsmiljö handlar det i det här fallet om busstrafik på landsbygden i ett kyligt klimat med mycket snö. Passagerarna transporteras till en regional busshållplats där fordonet, med uppvärmd kupé, väntar till dess att den regionala bussen anländer.

Petra Hanseklint
Petra Bassioukas Hanseklint, Skellefteå kommun, berättade om den sex månader långa pilotstudien med rubriken ”Rullande busshållplats”. Studien har stötts av innovationsprogrammet Infra Sweden 2030 och drivits som ett partnerskap mellan företaget Ramboll, Skellefteå kommun, Skellefteå buss, Region Västerbotten, K2 och RISE.
I augusti 2019 startar försök med de förarlösa skyttelbussarna som beställs av dem som behöver transport till regionala busshållplatser. Upptagningsområdet är 85 procent av den befolkning som bor upp till 2 km från närmaste busshållplats.
Vid försökens genomförande gäller det att finna teststräckor med inte alltför branta backar för passagerare som inte bor alltför långt från regionala, kommunägda busslinjer. Försöken skall utröna var bästa laddningsplatser finns för de autonoma bussarna. Nu förbereder man i samarbete med fordonstillverkare och universitet hur projektet skall implementeras.
Ett annat tänkbart användningsområde för de förarlösa bussarna är att transportera medicin, mat och post.
Bland utmaningarna är att bussarna skall klara temperaturer ned till -30 °C.
Självgående skogsmaskiner
En annan studie berättade Håkan Lindeskog, Luleå Universitet, om: En utvecklingsplattform för autonoma skogsmaskiner.

Håkan Lindeskog
Syftet är att inom ett avgränsat område kunna planera för en rutt med kontinuerlig skogsavverkning, inklusive nyplantering. Det skall kunna genomföras med så liten inverkan marken och med hänsyn även till andra miljöaspekter. Data skall kunna loggas för framtida behov.
Givetvis måste en sådan ”monstermaskin” som Håkan Lindeskog beskrev omfatta en rad säkerhetssystem. Maskinen beskrivs som en kombinerad skördare och transportör av timmer. Maskinen måste kunna känna av omgivningen med ett sofistikerat avkänningssystem.
Positionering av autonoma fordon
Förarlösa fordon kräver naturligtvis både hög precision i sin positionering och säkerhet. James Tidd, Waysure, beskrev två projekt som berör detta: Nätverks-RTK positionering för automatiserad körning, NPAD, och Precise and robust positioning for autonomous road transport, Propart.

James Tidd
NPAD syftar till att utveckla och demonstrera skalbara korrektionstjänster från GNSS via mobilkommunikation för autonoma fordon. Propart skall leda till utveckling och demonstration av hög noggrannhet, robusta GNSS-lösningar för autonoma fordon.
I båda projekten deltar Scania, AstraZero, Waysure och RISE.
Propart är ett EU-projekt där dessutom Fraunhofer, Ceit, Comsignia och Baselabs ingår.
NPAD är ett Vinnovastött projekt inom programmet Fordonsstrategisk forskning och innovation, FFI. I NPAD deltar, förutom Scania, AstaZero, Waysure och RISE också Lantmäteriet, Volvo, E/NRIDE, Ericsson och Caliterra AB.
Filed under: Teknikartiklar




